




Designing a Color and Height-Based Mini Conveyor Sorting System with LabVIEW Interface
 View
View
This project presents the development of a mini conveyor sorting system capable of classifying objects based on color and height. The system integrates embedded control, sensor processing, and LabVIEW-based monitoring into a compact automation platform.
Unlike simple color-only sorting systems, this design combines RGB detection and ultrasonic height measurement to improve classification accuracy.

System Architecture Overview
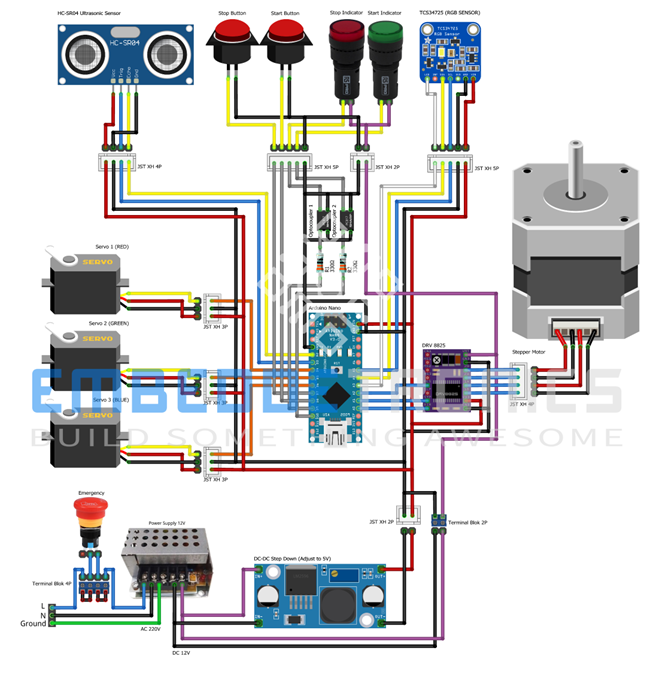
Based on the wiring architecture the system consists of:
- Arduino Nano (main controller)
- TCS34725 RGB sensor
- HC-SR04 ultrasonic sensor
- Stepper motor with DRV8825 driver
- Three servo motors (Red, Green, Blue diverters)
- 12V power supply + DC step-down converter
- Industrial push buttons and emergency stop
- LabVIEW HMI interface
The conveyor transports objects under the RGB sensor for color detection, while the ultrasonic sensor measures object height before classification.
RGB Sensor Calibration
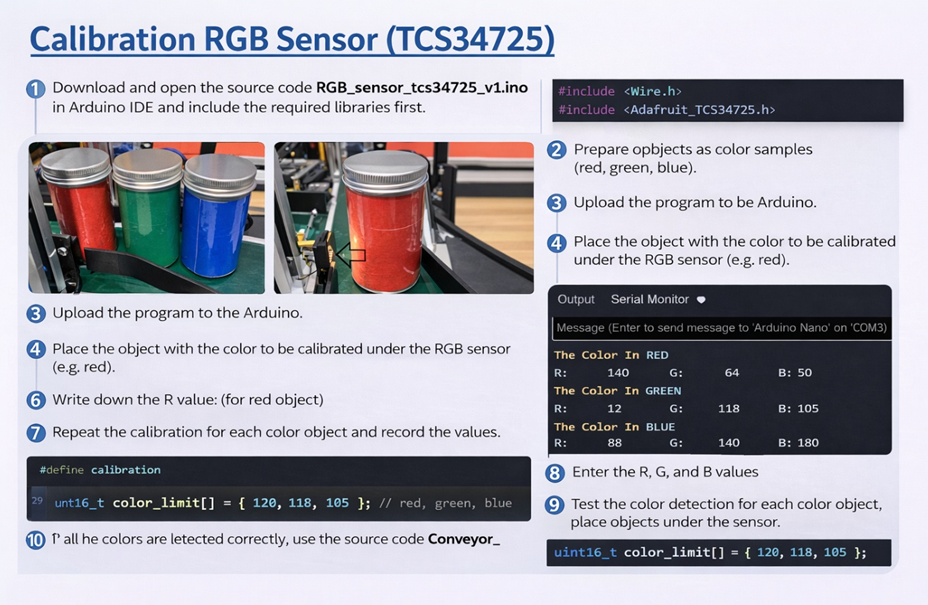
Calibration of the TCS34725 sensor is performed as described
Steps include:
- Upload RGB calibration program
- Place red, green, and blue sample objects
- Read RGB values via Serial Monitor
- Store threshold values in the firmware
Example configuration:
uint16_t color_limit[] = {120, 110, 105};
Proper calibration is critical to minimize misclassification due to ambient lighting.
Height Detection Integration
The ultrasonic sensor ensures that only objects within specified height limits are processed.
Configurable parameters include:
- Minimum height detection (3–10 cm)
- Maximum height object limit
- Delay check (minimum 1 second)
This prevents false detection from small debris or oversized objects.
Motor and Actuator Control
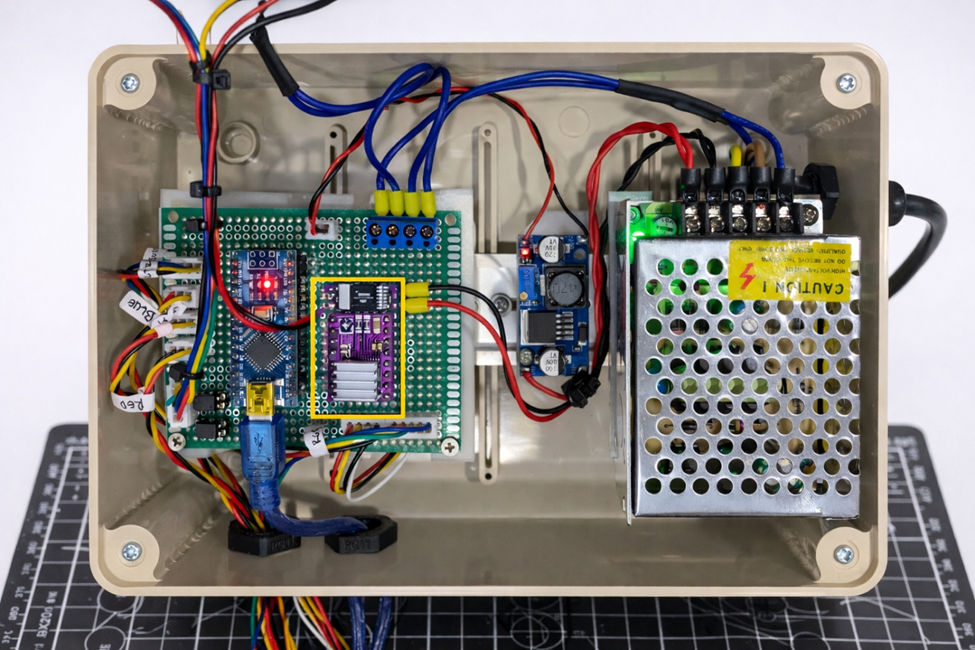
The stepper motor drives the conveyor using a DRV8825 driver. Speed control is adjustable via LabVIEW (0–100%).
Each color category is assigned to a dedicated servo motor:
- Servo Red
- Servo Green
- Servo Blue
Once classification is complete, the corresponding servo diverts the object into the correct bin.
LabVIEW Human-Machine Interface
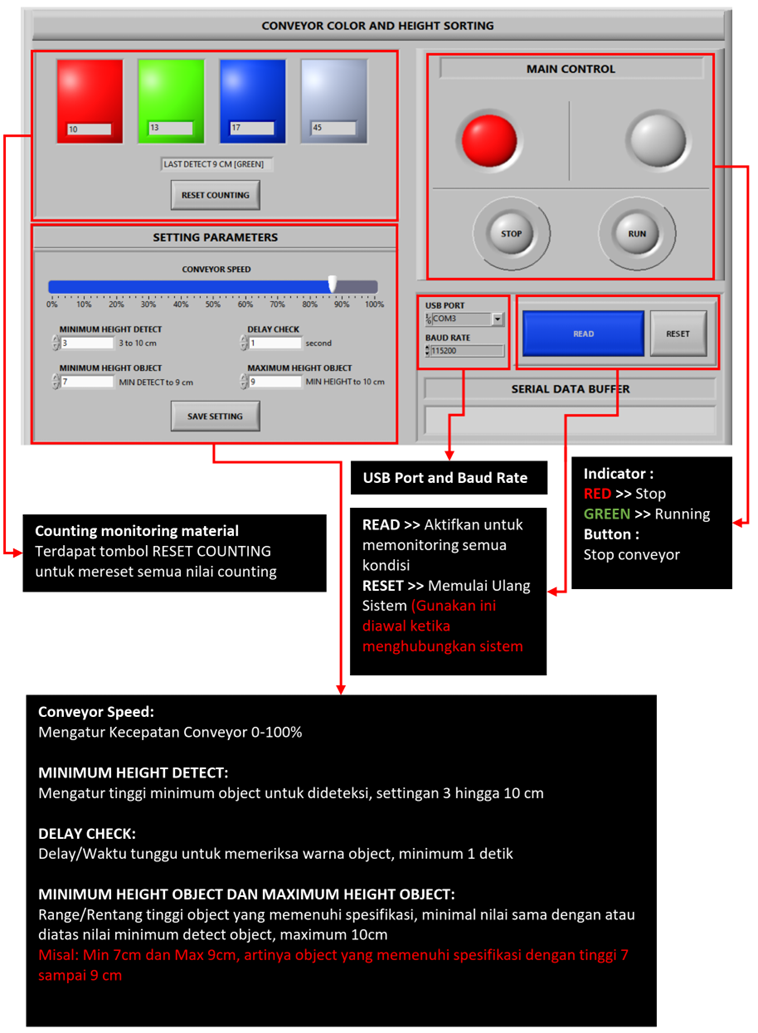
The LabVIEW provides:
- Conveyor status (Stop/Running indicator)
- USB port & baud rate configuration
- Real-time color detection display
- Object counting per category
- Speed control slider
- Reset counting function
Communication is performed via serial USB.
Bidirectional control allows:
- Start/Stop system
- Reset system
- Adjust detection parameters
Industrial Safety Features

The control panel includes:
- Red Stop button
- Green Run button
- Emergency stop switch
- Status indicator lamps
The emergency button disconnects the main power and locks the system.
Engineering Challenges
During development, the following issues were addressed:
- RGB variation due to lighting
- Timing synchronization between detection and servo actuation
- Stepper motor vibration
- Communication delay with LabVIEW
- Object spacing control
By calibrating delay parameters and refining firmware logic, sorting accuracy improved significantly.
#automation# #Embedded#
 #automation#
#Embedded#
#automation#
#Embedded#
Sign In Or Register Comment after
No comments yet. Be the first to comment!