




Stepper motors genralised idea
 View
View

Stepper motors were one of those components I kept hearing about, especially in things like 3D printers and CNC machines—but I didn’t really understand why they were used everywhere until I actually started working with them.
The main reason is precision. Unlike regular DC motors that just keep spinning, stepper motors move in fixed steps. Most commonly, that’s 1.8° per step, which gives 200 steps for one full rotation. This makes them really useful when you need controlled movement without adding sensors.
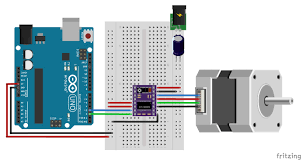
Internally, a stepper motor has a rotor (the shaft) and a stator with coils arranged in phases (usually A and B). By energizing these coils in a specific sequence, a rotating magnetic field is created, and the rotor keeps aligning with it. Instead of continuous rotation, it moves step by step.
One thing I initially misunderstood was microstepping. I thought it just increases the number of steps and gives more accuracy—but it’s a bit more nuanced than that.
With microstepping, instead of fully energizing one coil at a time, the driver controls current in both coils in ratios (like 50/50 or 75/25). This lets the rotor settle between full steps, making motion smoother and reducing vibrations. But it doesn’t necessarily mean you’re getting perfectly accurate “extra steps”—torque per microstep is lower, and there are nonlinearities.
Another thing that confused me early on was NEMA ratings. NEMA 17, NEMA 23, etc., don’t define performance—they only specify the physical size of the motor faceplate. Torque and current ratings can vary a lot even within the same NEMA size.
Drivers are also a big part of the system. Stepper motors aren’t just voltage-driven—you need drivers that regulate current properly. That’s where modules like A4988, DRV8825, and TMC2209 come in. Choosing the right one depends mainly on the current your motor needs and how smooth you want the motion.
Here are some common driver options and where they fit:
| Driver Name | Max Current | Voltage Range | Max Microstepping | Best For |
|---|---|---|---|---|
| A4988 | 2.0A | 8V – 35V | 1/16 | Budget NEMA 17 |
| DRV8825 | 2.5A | 8.2V – 45V | 1/32 | Higher voltage setups |
| TMC2209 | 2.8A (peak) | 4.75V – 28V | 1/256 | Silent, smooth motion |
| TB6600 | 4.0A | 9V – 42V | 1/32 | NEMA 23 / CNC |
| DM542 | 4.2A | 20V – 50V | 1/128 | Industrial setups |
| DM860H | 7.2A | 18V – 80V | 1/256 | Large NEMA 34 |
stepper gif from https://www.wikipedia.org/
#electronics# #robotics# #steppermotor# #embedded# #engineering#
 #electronics#
#robotics#
#steppermotor#
#embedded#
#engineering#
#electronics#
#robotics#
#steppermotor#
#embedded#
#engineering#
Sign In Or Register Comment after
No comments yet. Be the first to comment!