




How Ultrasonic Sensors Measure Distance
 View
View
Ultrasonic sensors are widely used in embedded systems to measure distance without physical contact. They are commonly found in applications such as obstacle detection, parking systems, and level measurement.
This article explains how ultrasonic sensors work and how distance is calculated.
Working Principle
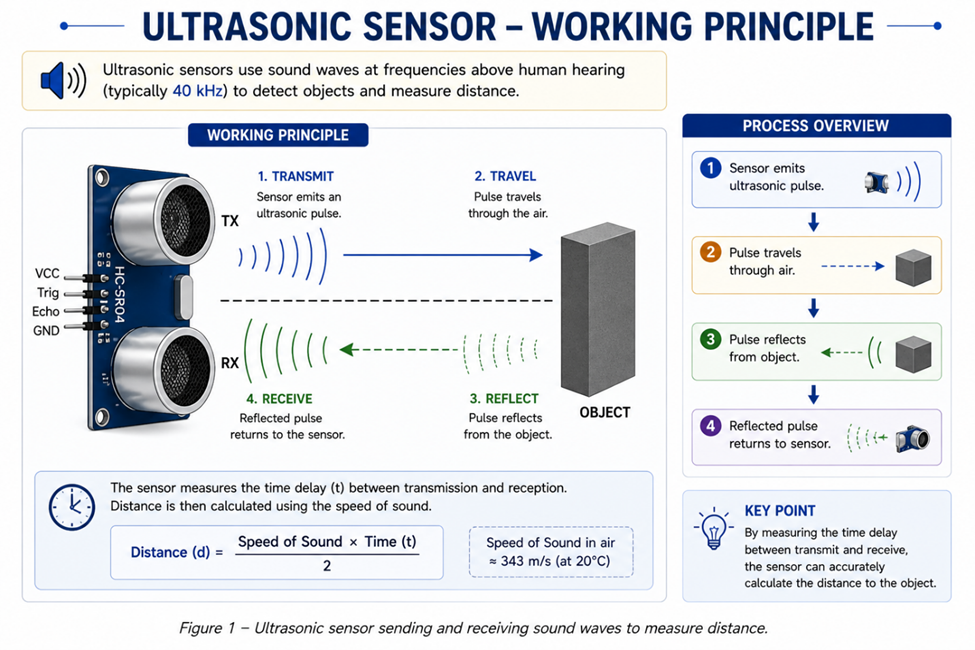
Ultrasonic sensors use sound waves at frequencies above human hearing (typically 40 kHz).
Process:
- Sensor emits ultrasonic pulse
- Pulse travels through air
- Reflects from object
- Returns to sensor
The sensor measures the time delay between transmission and reception.
Distance Calculation
Distance is calculated using:

Where:
- Speed of sound ≈ 343 m/s
- Time = round-trip travel time
Division by 2 is required because the signal travels to the object and back.
Sensor Interface
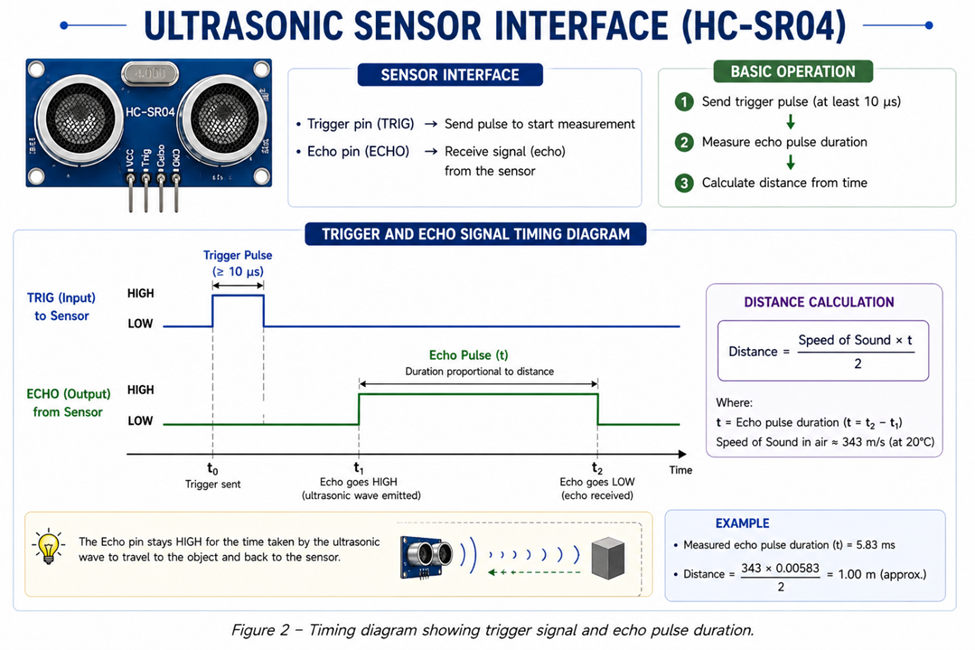
Typical ultrasonic sensor (HC-SR04) uses:
- Trigger pin → send pulse
- Echo pin → receive signal
Basic operation:
- Send trigger pulse
- Measure echo duration
- Calculate distance
Practical Considerations
- Measurement affected by temperature
- Soft surfaces reduce reflection
- Angle of object impacts accuracy
- Maximum range typically 2–4 meters
Improving Accuracy
- Average multiple readings
- Filter noisy signals
- Use temperature compensation
- Ensure proper sensor alignment
Applications
Ultrasonic sensors are used in:
- Obstacle detection systems
- Water level monitoring
- Robotics navigation
- Automotive parking sensors
Ultrasonic sensors provide a simple and reliable method for non-contact distance measurement. By using time-of-flight calculation, microcontrollers can accurately determine object distance in various applications.
#Sensors#
#Ultrasonic#
#DistanceMeasurement#
#EmbeddedSystem#
#Automation#
#Arduino#
 #Sensors#
#Ultrasonic#
#DistanceMeasurement#
#EmbeddedSystem#
#Automation#
#Arduino#
#Sensors#
#Ultrasonic#
#DistanceMeasurement#
#EmbeddedSystem#
#Automation#
#Arduino#
Sign In Or Register Comment after
No comments yet. Be the first to comment!