


 Electronic Community
Electronic Community
-
Mechanical Community
-
JLCPCB
-
JLC3DP
-
JLCCNC
-
JLCMC
-
JLCONE
-
EasyEDA



In my journey building flight controllers, I have seen many designers default to the AMS1117. While it is a "workhorse" for basic digital projects, using it to power a precision flight controller is like putting a noisy lawnmower engine into a luxury car.

If you want your EKF to be stable and your sensor to be accurate, you need a "Silent" power rail. Here is how I explain the shift from basic regulation to professional power integrity.
The AMS1117 Problem: Why it is "Dirty"

The AMS1117 is a linear regulator, but it is not a "Low-Noise" regulator. For a drone engineer, it has three major flaws:
- High Dropout Voltage: It usually requires about 1.1V to 1.3V of "headroom." If your battery drops, your 5V rail might dip, causing your 3.3V sensor rail to brown out.
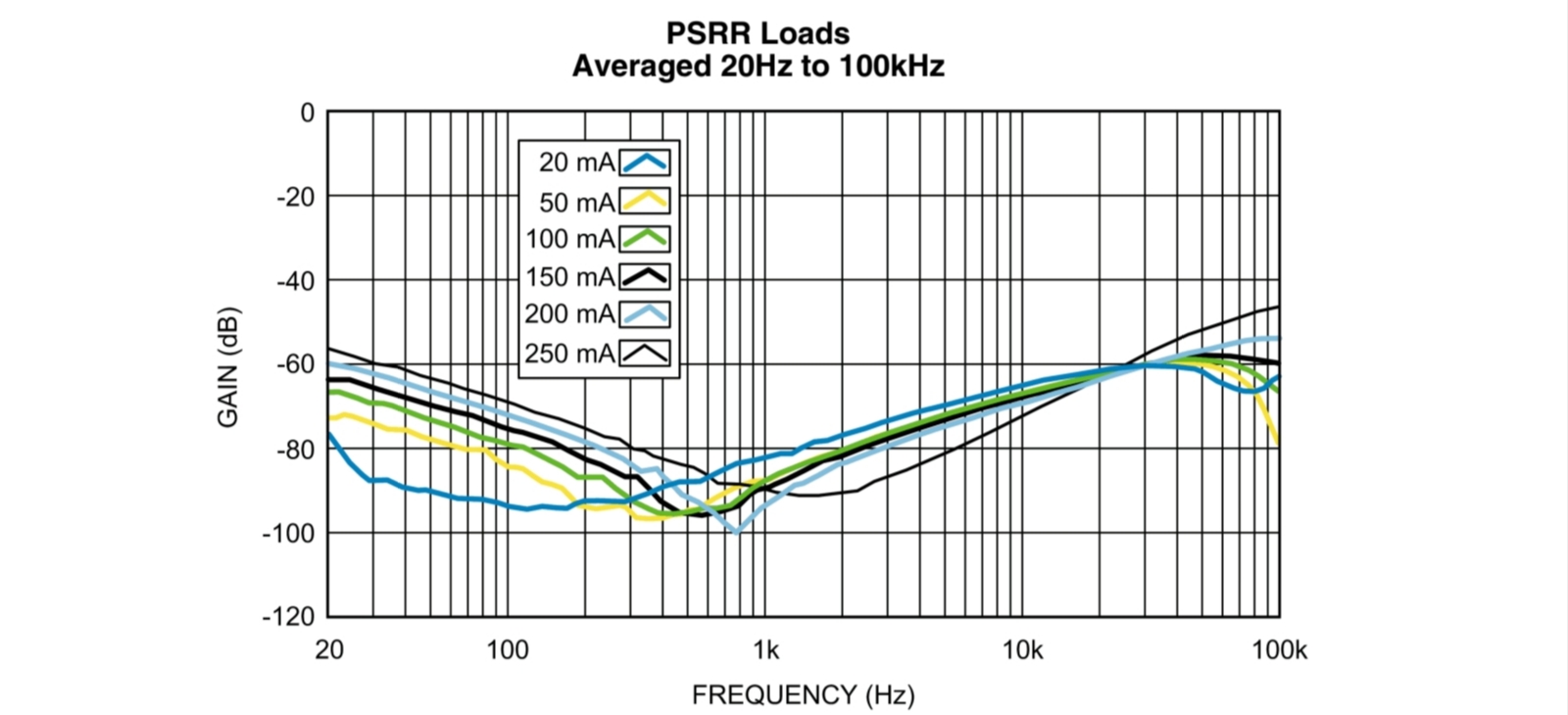
- Poor PSRR: Power Supply Rejection Ratio (PSRR) measures how well the LDO blocks noise from the input (like ESC switching noise). The AMS1117 has a low PSRR at high frequencies where motors operate.
- High Output Noise: It generates its own internal electrical "hiss" which can confuse the sensitive ADCs in your IMU.
Ultra-Low Noise LDOs
When I design a professional FC, I look for LDOs specifically marketed as Ultra-Low Noise or High PSRR. Examples the LP5907 or MIC5219.
You should look for:
- PSRR (dB): Look for values above 60dB or 70dB at 10kHz. This tells you the LDO is an active filter against motor noise.
- Noise (uVRMS): A silent LDO should have an output noise below 10uVRMS (from 10Hz to 100kHz).
- Accuracy: Look for 1% or 2% output voltage accuracy to ensure your sensors always see exactly 3.3V.
This images shown the PSRR vs. Frequency graph in an LDO datasheet. This curve illustrates how effectively the regulator blocks noise at different motor RPM frequencies.
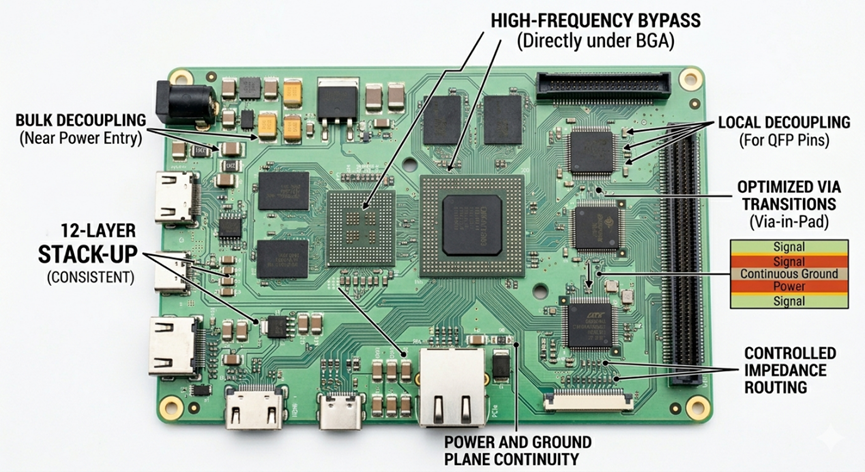
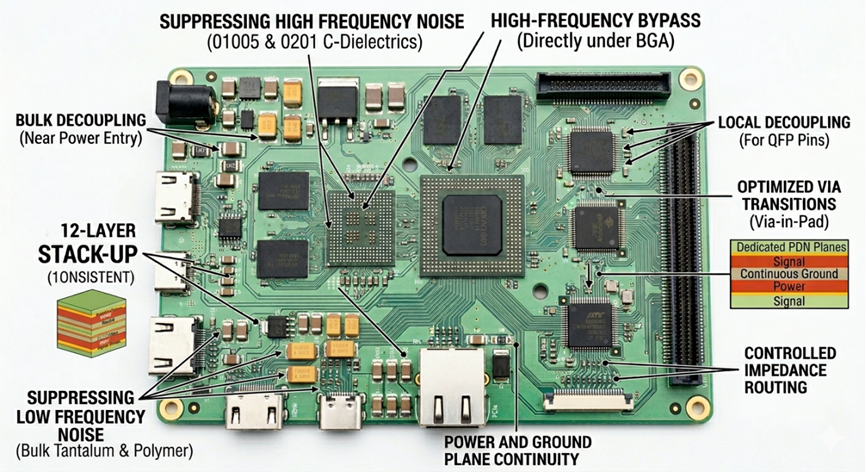
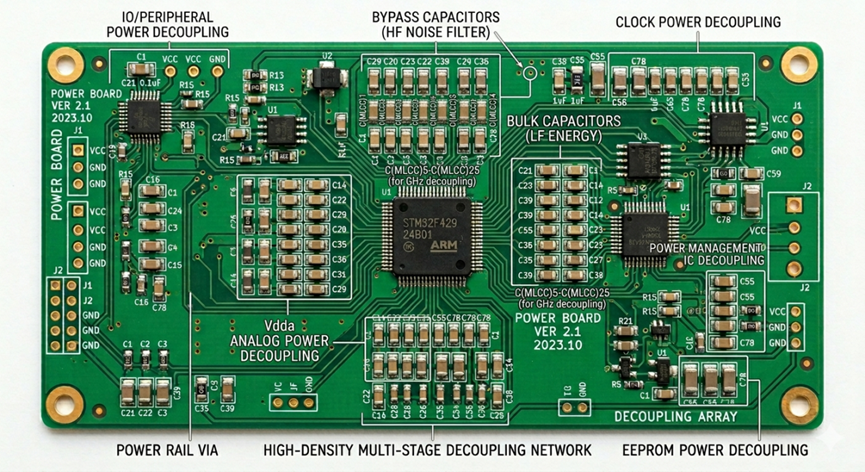
Designing the "Silent" Rail Architecture
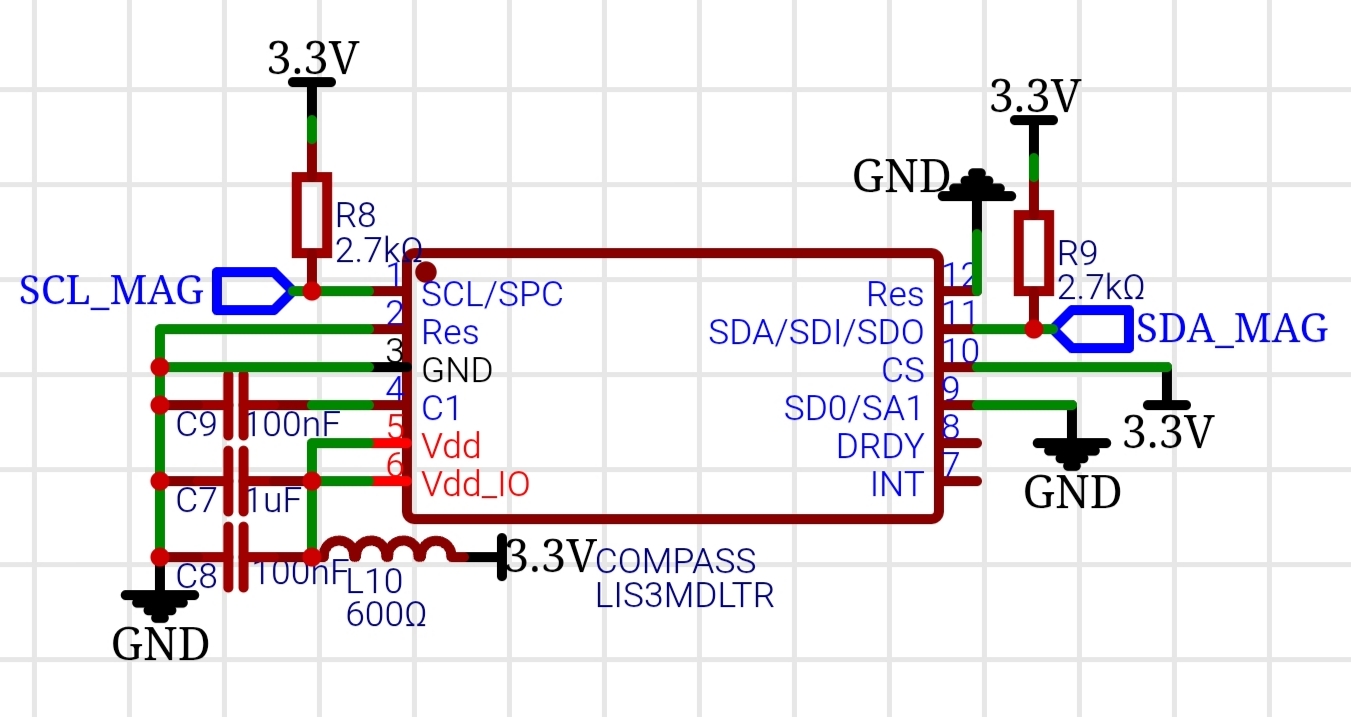
An LDO alone is not enough. You must build a Pi-Filter (C-L-C) to protect your sensors.

Here is the standard implementation I use for the 3.3V rail. The Component Recipe:
- Input Bulk Capacitor:22uF tantalum or high-quality ceramic. This handles the "big" ripples from the main battery.
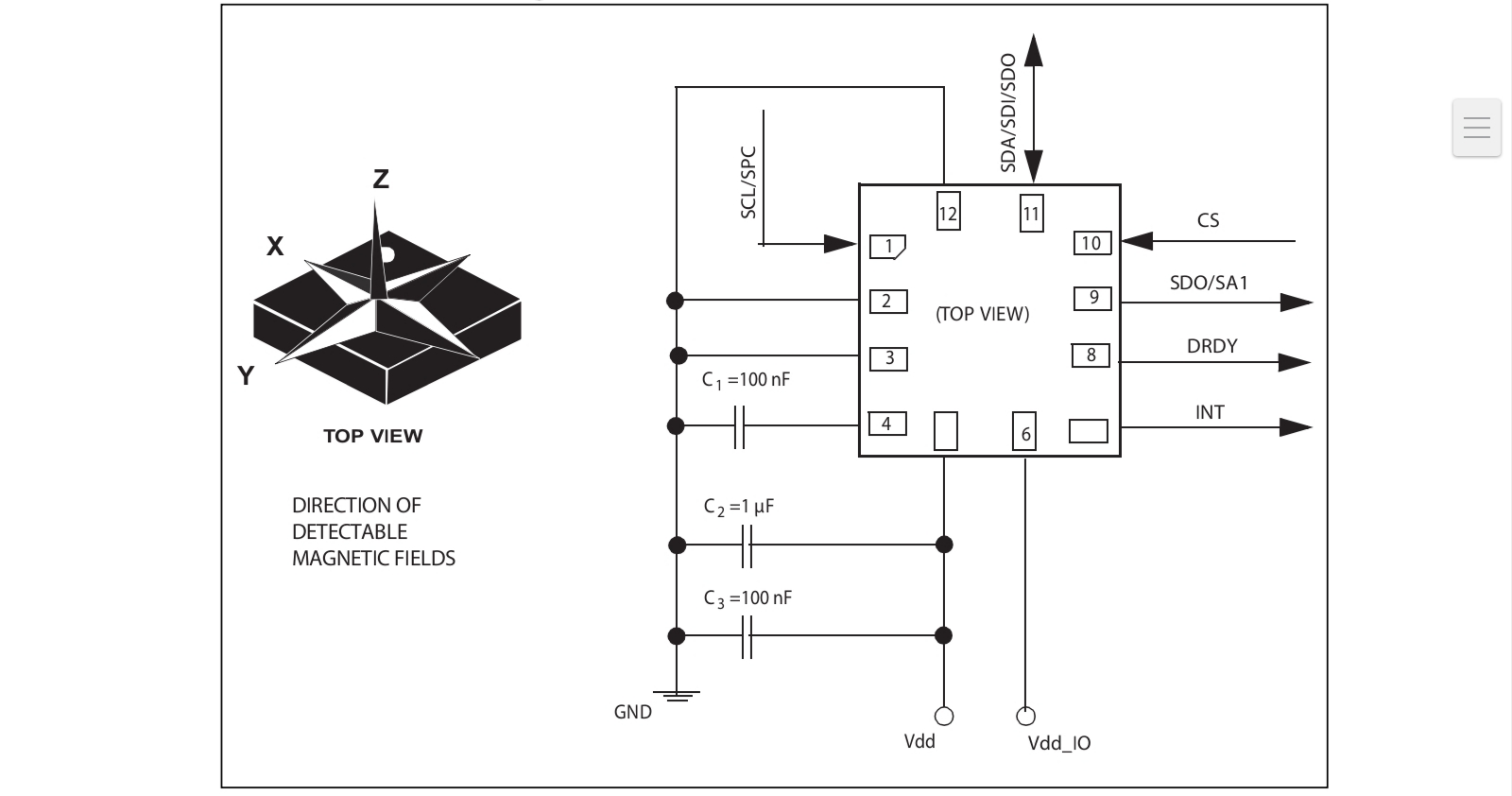
- The Ferrite Bead: Use a 10uH or 600Ohm (at 100MHz) ferrite bead between the LDO and the sensor. This acts as a wall against high-frequency RF noise.
- Output Decoupling: Use a combination of 10uF (for stability) and 100nF (for high-frequency spikes).
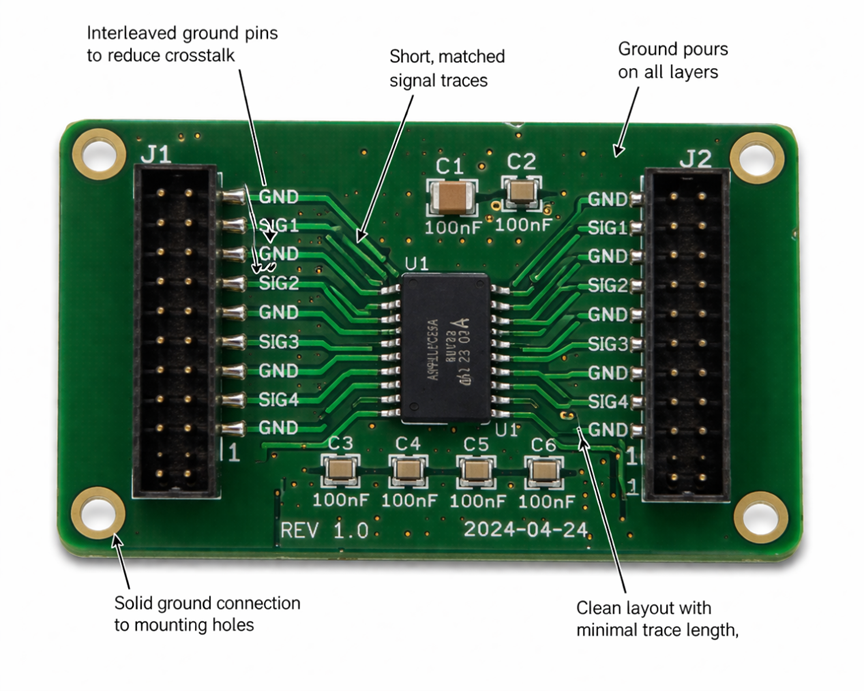
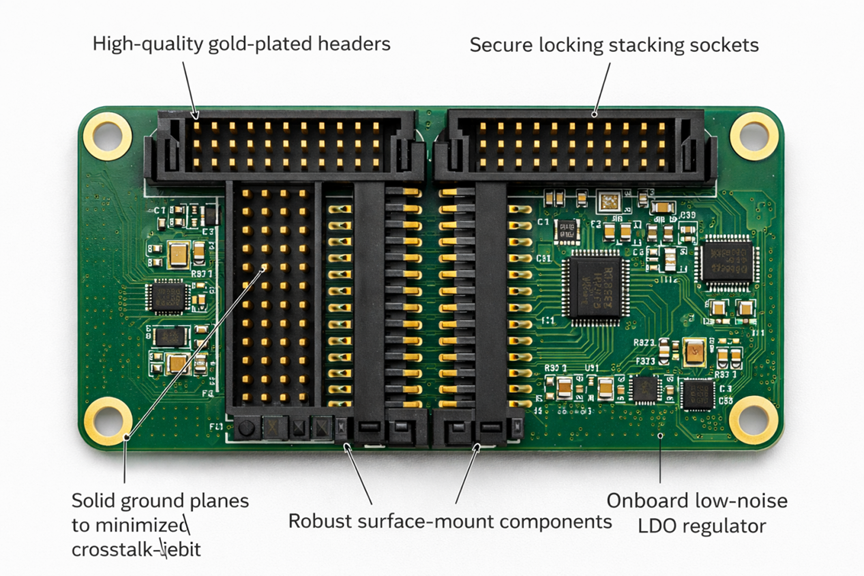
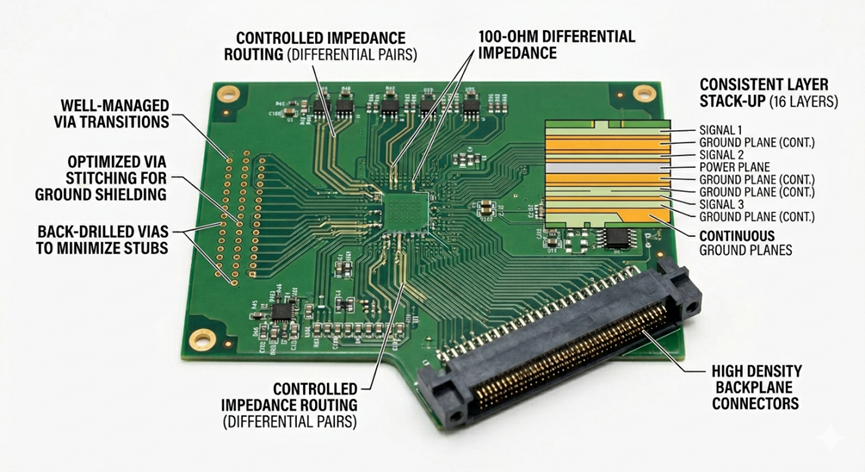
Layout
In my experience, the schematic is only 50% of the work. The other 50% is the PCB Layout.
- Ground Planes: Use a solid Ground Plane. Do not "snake" your ground traces.
- Kelvin Sensing: Place your output capacitors as close as humanly possible to the Vdd pins of your IMU and Compass.
- Isolation: Keep the noisy AMS1117 (if used for LEDs or non-critical parts) on a completely different side of the board from your sensor LDO.
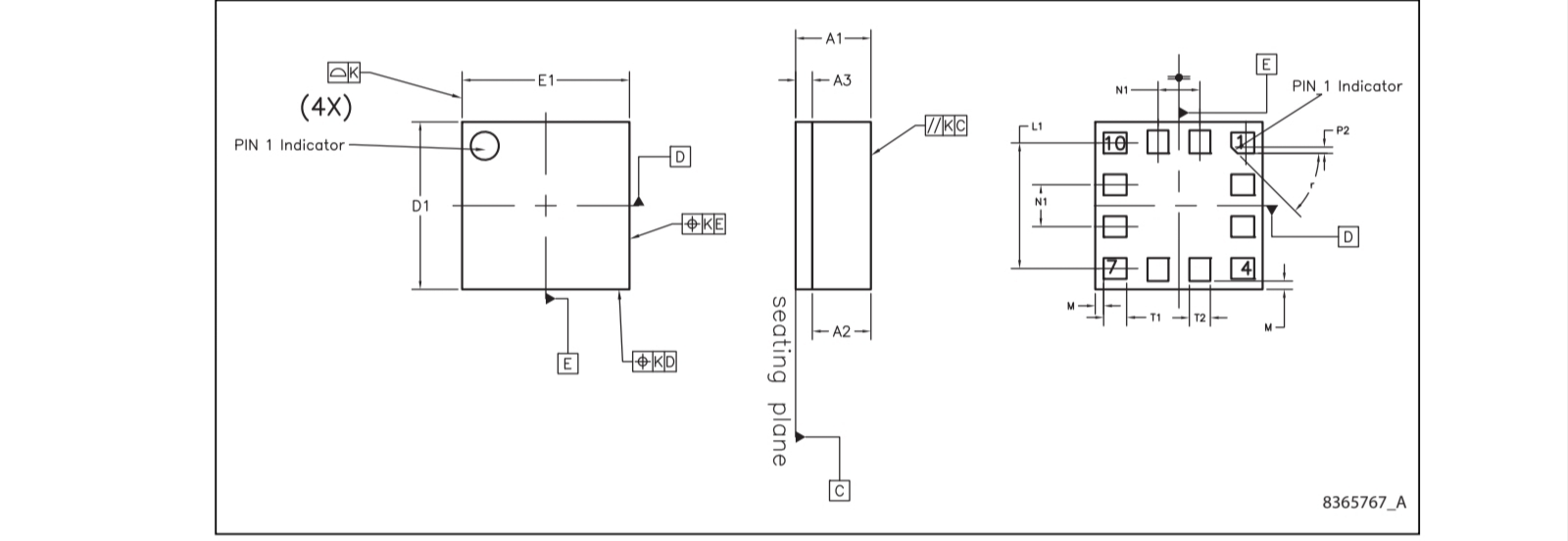
VFLGA-12 package outline and pin indicators to assist in correct PCB footprint design.
Recommended Resources
Professional Websites
- TI Precision Hub: An incredible resource for learning about LDO noise. Texas Instruments - LDO Noise Demystified
- Analog Devices (ADI) Education: Deep dives into PSRR and power integrity. Analog Devices - Power Management Design
Journals and Papers
- "Power Supply Noise Reduction in Sensor Systems": Search this on** IEEE Xplore**. It explains why high-frequency noise causes "bias instability" in gyroscopes.
- "System-on-Chip (SoC) Power Integrity": While advanced, this journal content explains the importance of decoupling capacitors like the 22uF and 100nF combo I mentioned.
In my previous guide, I showed you how to design a high-redundancy Flight Controller (FC) using 2 IMUs and 2 Barometers. But having multiple sensors is useless if the "brain" doesn't know how to merge their data. If one IMU is vibrating and one Barometer has a pressure spike, which one should the drone trust?
This is where the Extended Kalman Filter (EKF) comes in. It is the gold standard for state estimation in modern UAVs.
What is EKF and Why "Extended"?

A standard Kalman Filter works perfectly for linear systems. However, drones are non-linear; rotating a drone by 90 degrees involves trigonometry (sin, cos), which creates curves, not straight lines. The Extended part of the EKF uses a mathematical trick called "Linearization" (usually via a Jacobian matrix) to handle these complex movements.In your custom FC, the EKF performs three main tasks:
- Estimation: It guesses the drone's position, velocity, and orientation (Attitude).
- Prediction: It uses your IMUs (Accelerometer and Gyroscope) to predict where the drone will be in the next millisecond.
- Correction: It compares that prediction with "Truth" sensors like your Compass, GPS, and Barometers to fix any errors.
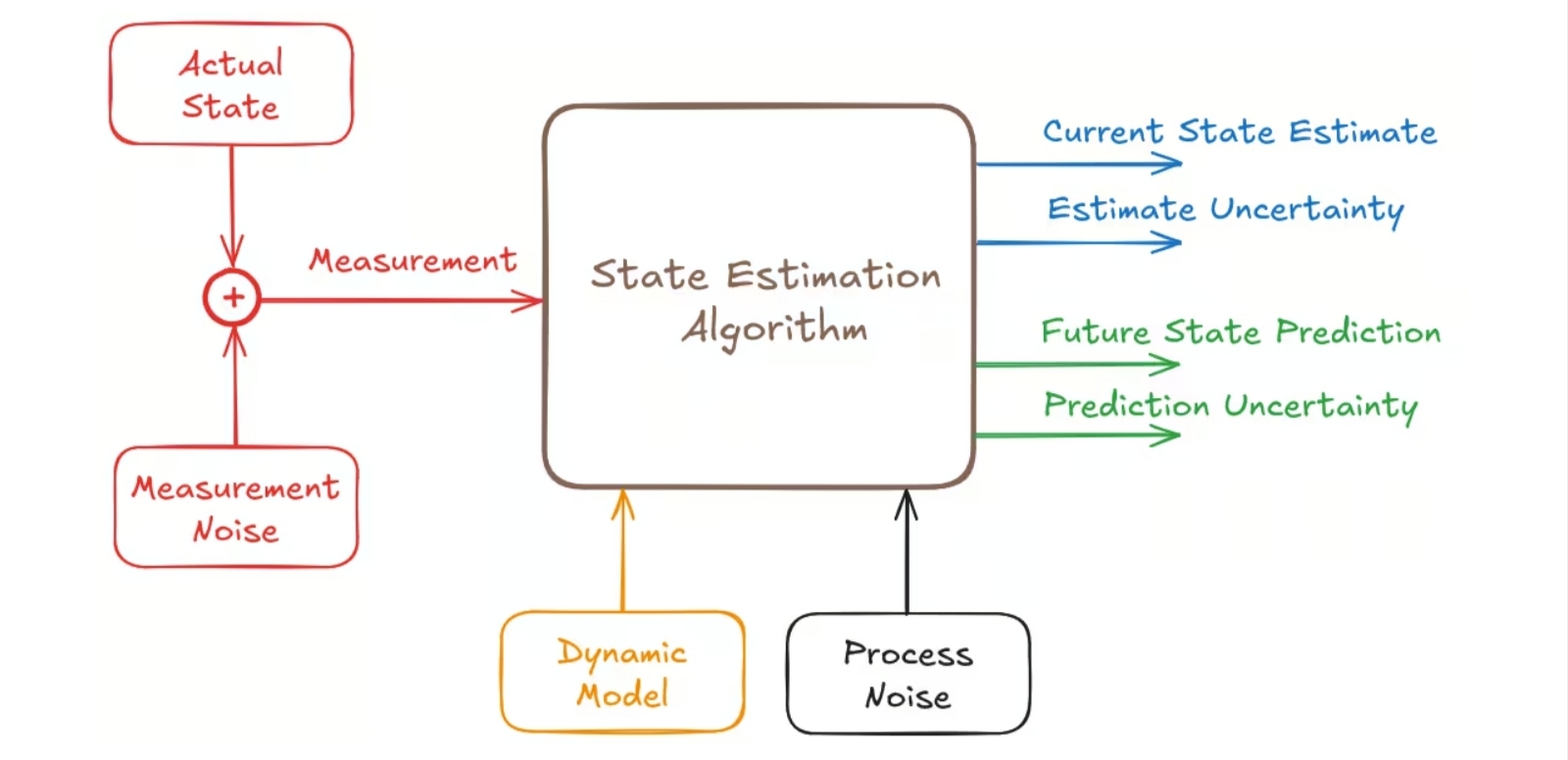
This images shown the basic loop of a Kalman Filter: Predict (Time Update) and Correct (Measurement Update).
Managing 2 IMUs and 2 Barometers
When you have a redundant setup like the one I designed, the EKF becomes a "Manager." Most advanced firmwares (like ArduPilot or PX4) actually run multiple EKF instances simultaneously.
IMU Blending
The EKF calculates the Innovation for each IMU. Innovation is simply the difference between what the IMU says and what the other sensors (GPS/Baro) expect.
- If IMU1 has high vibration, its Innovation Variance will increase.
- The EKF will automatically "weight" the data more toward IMU2.
- This prevents a single sensor failure from causing a "flyaway."
Barometer Voting
With 2 Barometers, the EKF compares the pressure altitude. If one Barometer is placed near a hole in the frame and experiences "wind buffeting," the EKF detects the noise and relies on the cleaner Barometer.
Key Parameters for Your Code
When programming your EKF, you need to define Noise Density for your specific hardware. For example, if you are using an ICM-42688-P or MPU6000, you should look at the "Spectral Noise" section of the datasheet.
| Parameter | Recommended Value (Standard Units) |
|---|---|
| Gyro Noise | 0.005 deg/s/sqrt(Hz) |
| Accel Noise | 0.5 m/s/s |
| Baro Noise | 2.0 meters |
| EKF Period | 10ms |
If you use a decoupling capacitor like a 22uF or 100nF near the IMU power pins, you can lower the "Noise" value in your EKF code, making the drone much "snappier" and more stable.
This images shown the Noise Density table in an IMU.

Implementation Resources
To truly master EKF for your project, I highly recommend studying these professional resources:
Technical Documentation
ArduPilot EKF3 Wiki: The best practical guide on how EKF handles multiple IMUs.
Website: https://ardupilot.org/dev/docs/ekf.html?hl=id-ID
PX4 Estimation Guide: Excellent explanation of the 24-state EKF.
Website: https://docs.px4.io/main/en/advanced_config/tuning_the_ecl_ekf
Journals and Academic Papers
"A New Approach to Linear Filtering and Prediction Problems" by R.E. Kalman (1960). This is the foundational paper.





Meet SLM 316L Stainless Steel at JLC3DP. We bridge the gap between high-end engineering and budget-friendly manufacturing.
✅ From $8.00 | Start small, scale big.
✅ 72h Lead Time | 3 days from CAD/STL file to metal.
✅ 600 MPa Tensile Strength | Built for heavy-duty use.
✅ Excellent Corrosion Resistance | Marine & Medical grade.
✅ Complex Internal Geometries | Designs CNC can't touch.
The perfect bridge between prototyping and mass production. 🛠️
Check out our 316L capabilities:https://jlc3dp.com/help/article/316L-Stainless-Steel
#3DPrinting# #Tech# #JLC3DP# #Manufacturing# #MetalPrint# #IndustrialDesign# #SLM316L#